There are multiple types of tissues and nerves in biological skin that can sense various shapes, textures, temperature changes and pressures, and convert these complex signals into electrical signals. After these electrical signals are processed by the central nervous system, the creatures can Environmental stimuli interact. Based on the working principle of biological skin, the use of different conduction methods to convert external stimuli into electrical signals is the basic theoretical basis for electronic skin research.
Electronic skin is generally composed of an electrode, a dielectric material, an active material, and a flexible substrate. The active functional layer converts the environmental stimulus into a detectable point signal. The dielectric material is usually used as an electrode layer on both sides of the active functional layer for receiving and transmitting electrical signals, and the flexible substrate serves to carry the electronic skin while ensuring the biological skin. Or the compatibility of other materials.

The principle of electronic skin is not complicated, but electronic skin as an external component is easily damaged and subject to frequent deformation characteristics, making electronic skin face great challenges in material selection. Flexible substrates and active materials are critical to the development and selection of electronic skin.
Flexible substrate
Conventional sensors are usually based on inorganic silicon. Flexible substrates used in flexible sensors need to be transparent and soft, in addition to the insulation of inorganic silicon substrates, to achieve aesthetic and complex mechanical deformation. Existing flexible substrates include: polydimethylsiloxane (PDMS), polyethylene terephthalate (PET), polyimide (PI), polyethylene (PE), and polyurethane (PU). The electronic skin adopts PDMS and PI as the substrate. This is because PDMS has good flexibility and flexibility, and PDMS has good bonding with electronic materials. PDMS can be prepared into specific geometric shapes to meet structural requirements. PI is not only excellent in insulation and chemical stability, but also has strong bending properties, and there is no physical damage even under large stress conditions, which makes PI widely used in electronic skin.


Active functional layer
The active functional layer is the most important component of electronic skin. It expresses environmental stimuli such as temperature, humidity and pressure quantitatively through electrical signals, and gives the electronic skin the ability to perceive the environment. Some high-precision flexible sensors are even more sensitive than human skin, and can distinguish between slight air fluctuations and heartbeat vibrations caused by breathing.


In the study of electronic skin function layers, tactile classes, which are the most widely studied in the pressure functional layer, are called pressure electronic skin or tactile electronic skin. According to the principle of the functional layer, the pressure electron skin is divided into a piezoresistive type, a pressure-capacitive type, a piezoelectric type and a triboelectric type.

Piezoresistive type: The external force is converted into a change in resistance (proportional to the square root of the applied pressure), which makes it easy to indirectly detect changes in external force with an electrical test system. The change of the conductive path between the conductive materials is a common mechanism for obtaining the piezoresistive sensing signal. These sensors are widely used due to their simple device and signal readout mechanism.
Pressure-capacitive type: Capacitance is a physical quantity that measures the ability to hold charge between parallel plates. Conventional capacitive sensors detect different forces, such as pressure, shear forces, etc., by varying the opposing area s and the parallel plate spacing d. The main advantage of the pressure capacity is that it is sensitive to forces and can achieve low static energy to detect small static forces.
Piezoelectric type: Piezoelectric material is a special material that can generate electric charge under mechanical pressure. This piezoelectric property is caused by the electric dipole moment that is present. The electric dipole moment is obtained by deformation of an oriented non-centrosymmetric crystal structure, or a porous electret in which a charge persists in the pore. The piezoelectric coefficient is a physical quantity that measures the energy conversion efficiency of a piezoelectric material. The higher the piezoelectric coefficient, the higher the efficiency of energy conversion. Highly sensitive, fast response and high voltage electrical piezoelectric materials are widely used in sensors that convert pressure into electrical signals.
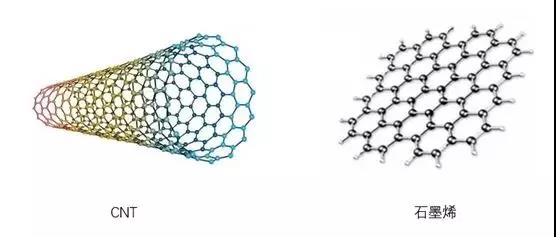
Carbon nanotubes (CNTs) and graphenes have excellent mechanical properties and chemical stability. They also have very high electron transport capacity, and electron mobility reaches 10,000 cm2 V-1S-1 ~20000 cm2 V-1S-1 It has excellent piezoresistive and piezoelectric properties and is an excellent material for piezoresistive and piezoelectric active functional layers. Simple silicon (Si), zinc oxide (ZnO), gallium arsenide (GaAs), and cadmium selenide (CdSe) are difficult to use in large-area flexible electronic electronic skin when these materials can be used with elastomers (PDMS, sponges). , porous material) organic compounding is to make it an efficient active material.
summary
With the rapid development of materials science, flexible electronics and nanotechnology, the basic performance of electronic skin sensitivity, range, size and spatial resolution has improved rapidly, even beyond human skin. At the same time, in order to adapt to the sensing requirements of force, heat, humidity, gas, biology, chemistry and other multi-stimulus resolution, the device design is more compact and the integration scheme is more mature. Smart sensor devices with practical functions such as biocompatibility, biodegradability, self-repair, self-energy and visualization have also emerged. In addition, the electronic skin is also moving towards integration, that is, the touch sensor is effectively integrated with related functional components (such as power supply, wireless transceiver module, signal processing, actuator, etc.) for specific applications, creating good flexibility, space adaptability and Functional wearable platform. Meeting these challenges will bring new opportunities and indicate future directions for related material preparation, device processing and system integration. There is no doubt that the electronic skin will be more flexible, thinner, intelligent, multi-functional, and humanized.
-aMine-728039-63-2.gif)
![2,4-Bis([1,1'-biphenyl]-4-yl)-6-chloro-1,3,5-triazine-182918-13-4](http://v4-upload.goalsites.com/224/image_1570496861_182918-13-4.jpg)
amine-102113-98-4.gif)
![Nphenyldibenzo[b,d]furan-4-amine-743453-07-8](http://v4-upload.goalsites.com/224/image_1543412330_Nphenyldibenzo[b,d]furan-4-amine-743453-07-8.gif)
-1,3,5-triazine-112719-97-8.gif)

-4,6-diphenyl-1,3,5-triazine-864377-31-1.gif)
-N-phenylaniline-81090-53-1.gif)